
Research Overview
My ultimate goal is to employ artificial intelligence and interdisciplinary research as tools to shape a better world. For that, I have delved into the transportation domain as the use case. The essence of transportation is to reconcile the spatio-temporal imbalance in the distribution of matter, information and energy, which is all about time and space. Thus, I had attached the utmost importance to the spatial-temporal correlations in my research.
My current research centres around three main pillars, i.e.,
1) Deep Learning for sensing and anomaly detecting,
2) Deep Reinforcement Learning for controlling and decision-making,
3) Big Data Analytics for spatial-temporal pattern mining.
Deep Learning for Sensing and Anomaly Detecting
Sensing—Lane Detection as the Case Study
- Objective: To develop robust spatial-temporal neural network models to tackle lane detection in challenging scenes
Delivery: Three research papers, one patent, and one software registration
- A Hybrid Spatial-temporal Deep Learning Architecture for Lane Detection (Published in CACIE)
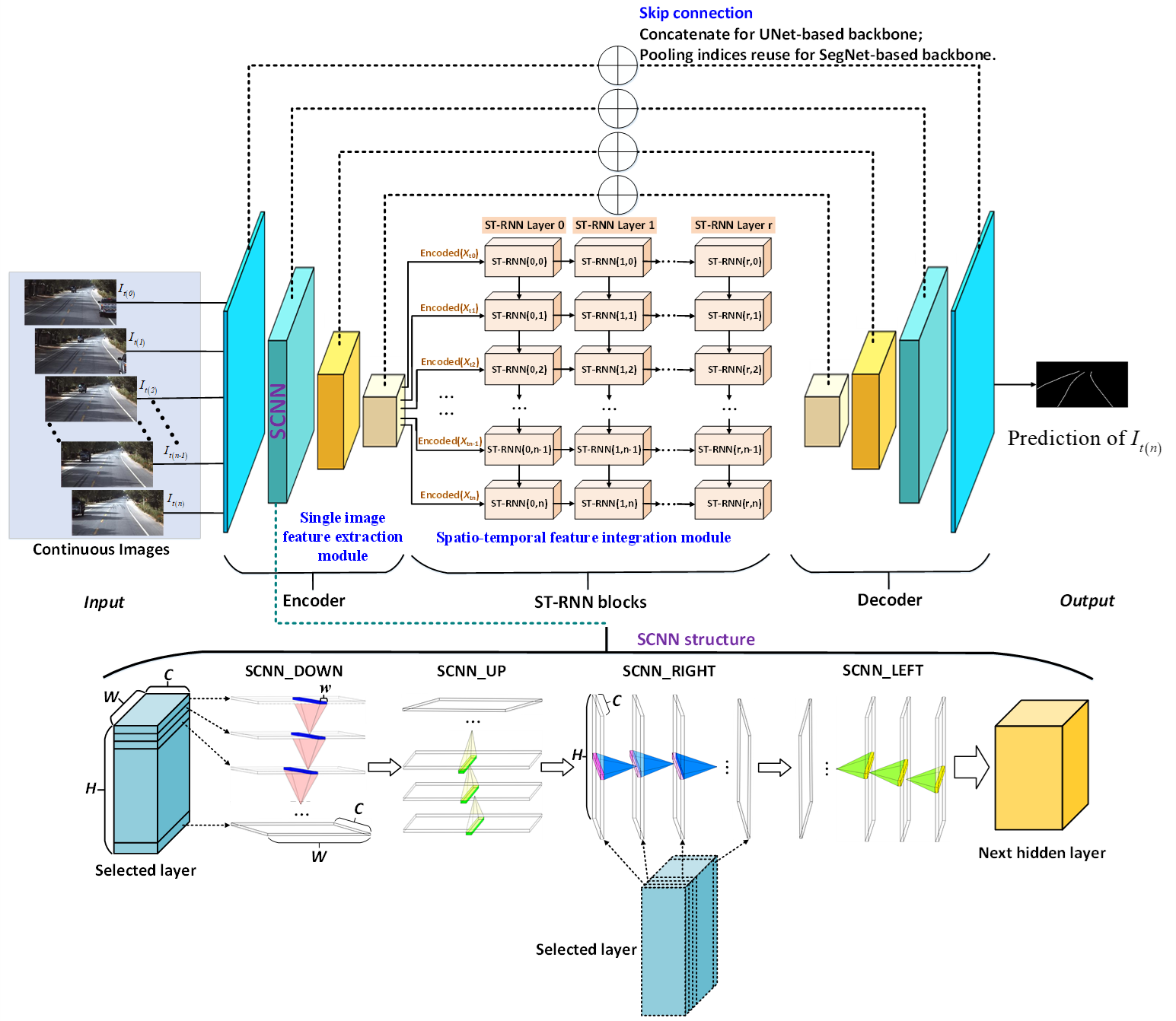
The architecture of the proposed hybrid spatial-temporal sequence-to-one spatial-temporal neural network model
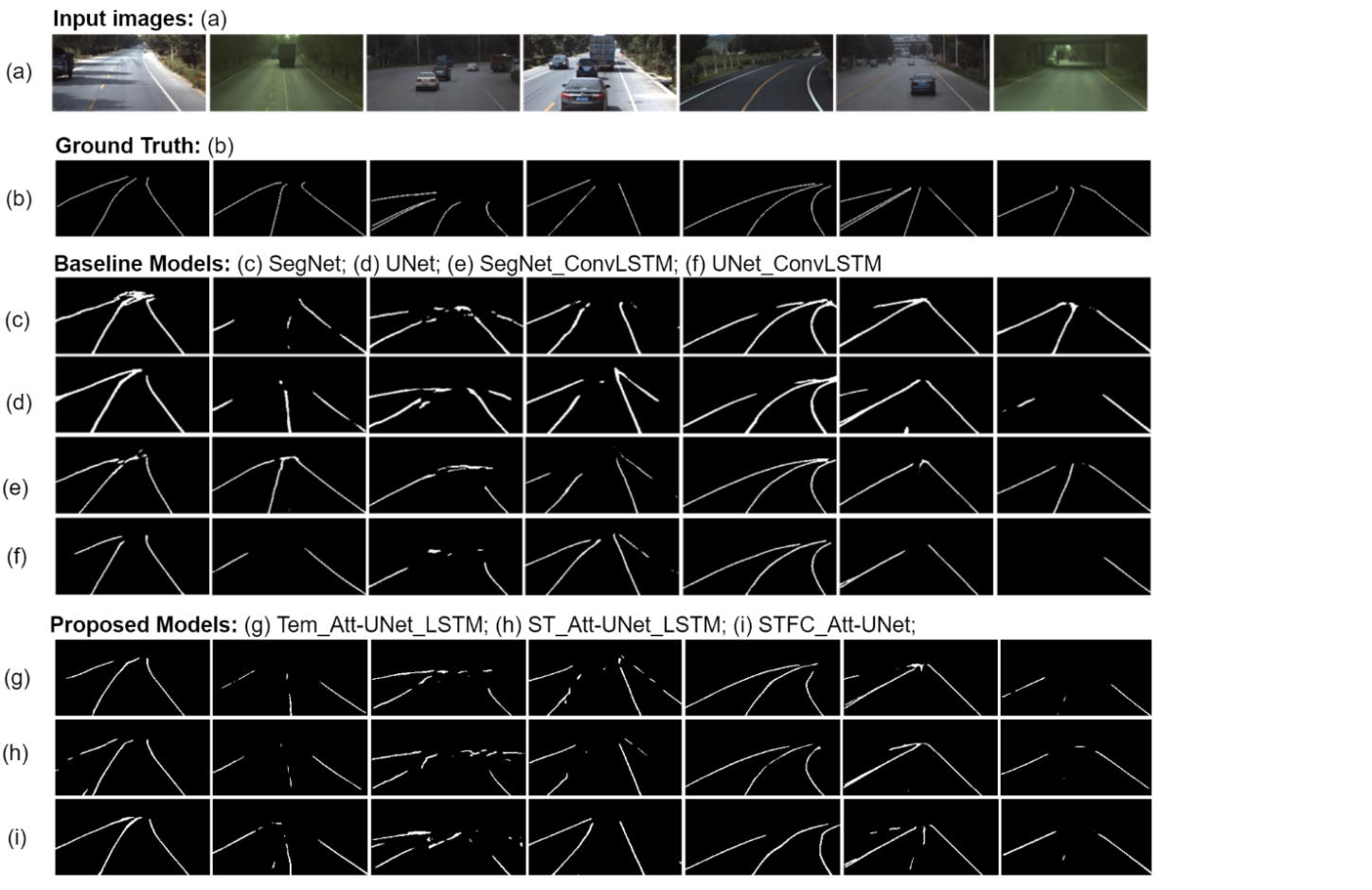
Lane detection results testing on the tvtLANE dataset
- Sequential Neural Network Model with Spatial-Temporal Attention Mechanism for Robust Lane Detection Using Multi Continuous Image Frames (Under view by TR_C and accepted by TRB 2023)
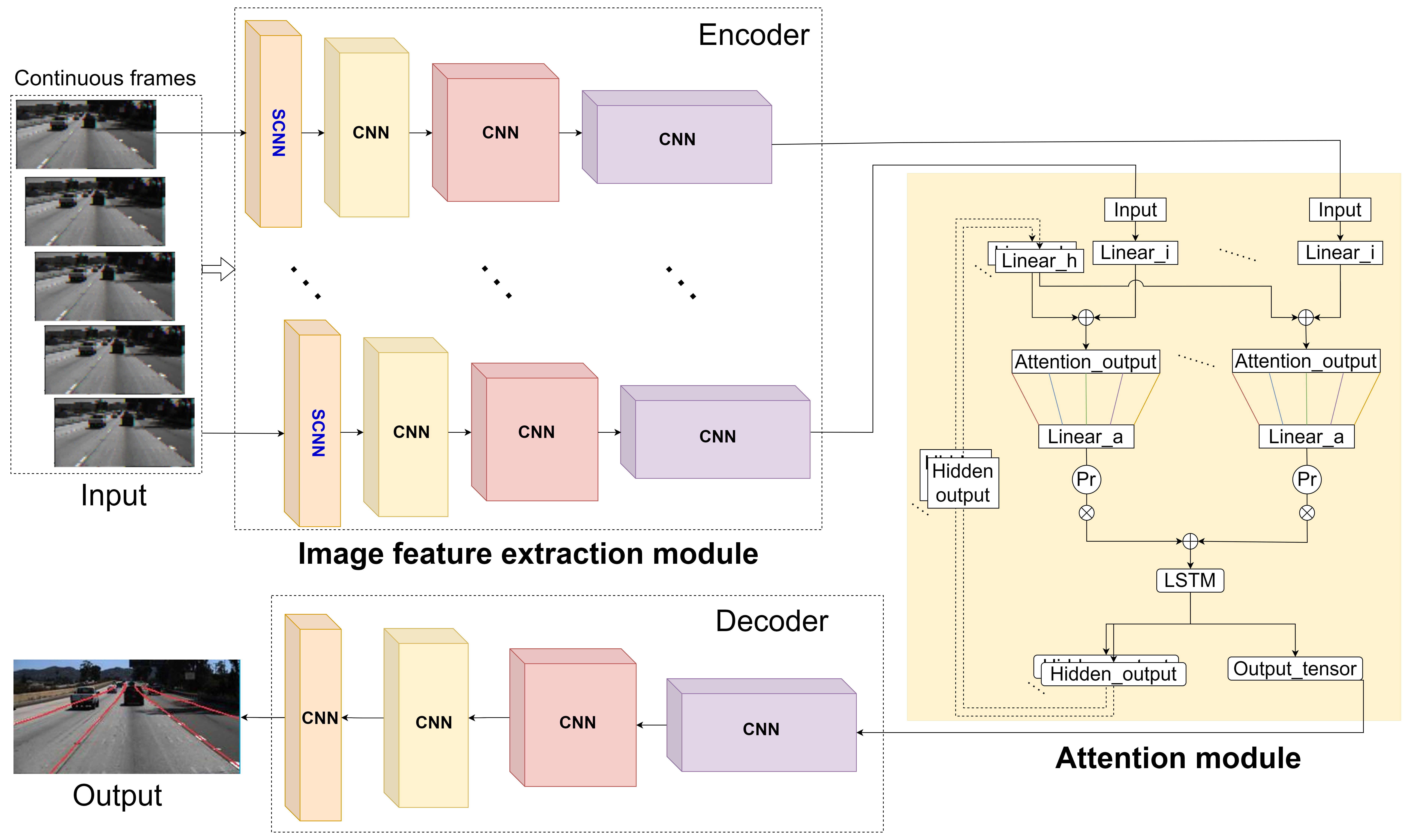
The architecture of the proposed sequential neural network model with spatial-temporal attention mechanism
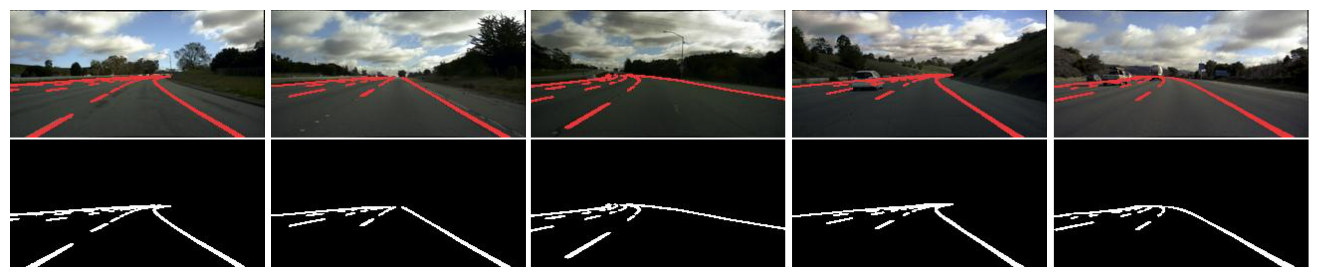
Lane detection results testing on LLAMAS dataset
- Robust Lane Detection through Self Pre-training with Masked Sequential Autoencoders and Fine-tuning with Customized PolyLoss (Published in IEEE-T-ITS and presented at TRB 2023)
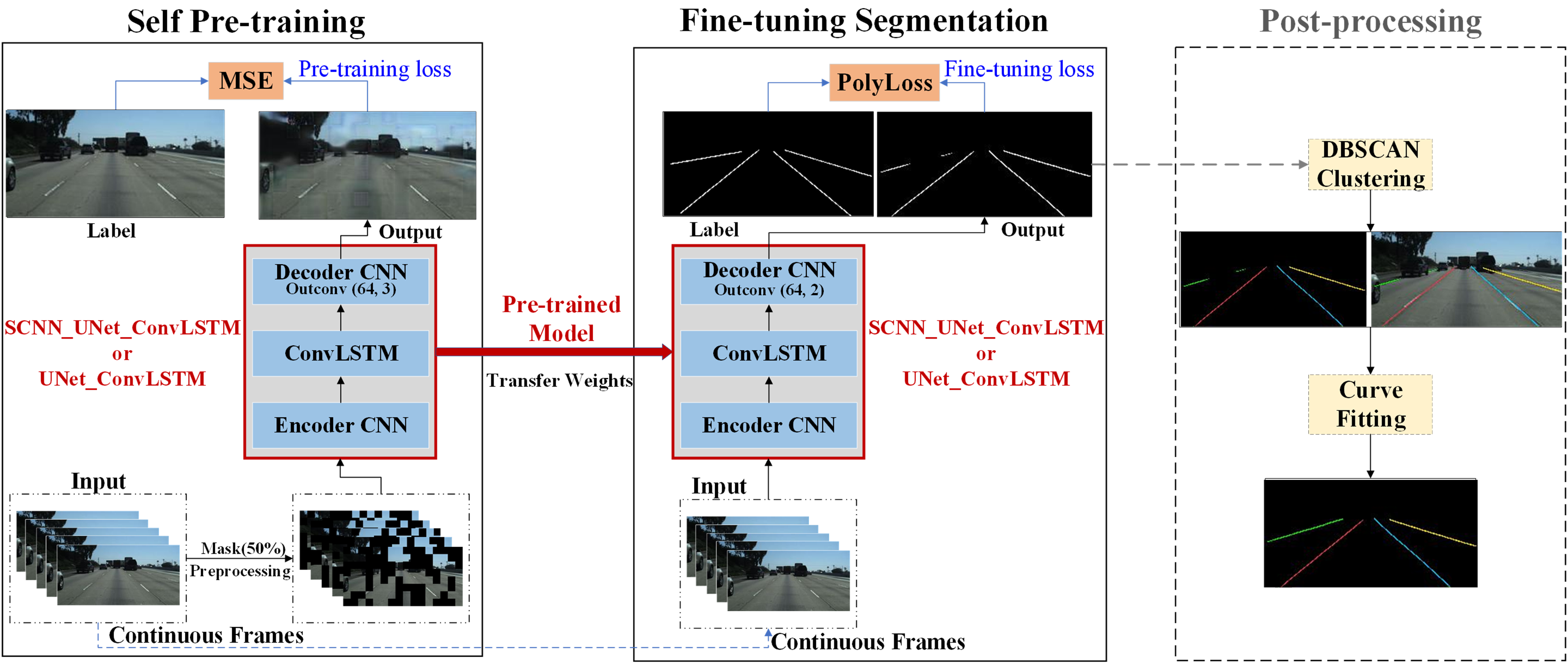
The framework of the proposed three-phase pipeline

Anomaly Detection
- Intelligent Anomaly Detection for Lane Rendering Using Transformer with Self-Supervised Pre-Training and Customized Fine-Tuning (Published in TRR; Accepted by TRB2024 and CICTP 2023 for presentation)
- Objective: To efficiently detect whether there are defects in the rendered generated map data for navigation
- Developed and implemented a 4-phase pipeline incorporating data pre-processing, self-supervised pre-training with the masked image modelling (MiM) method, customized fine-tuning with cross-entropy loss (or its variants), and post-processing

Seven types of anomalies
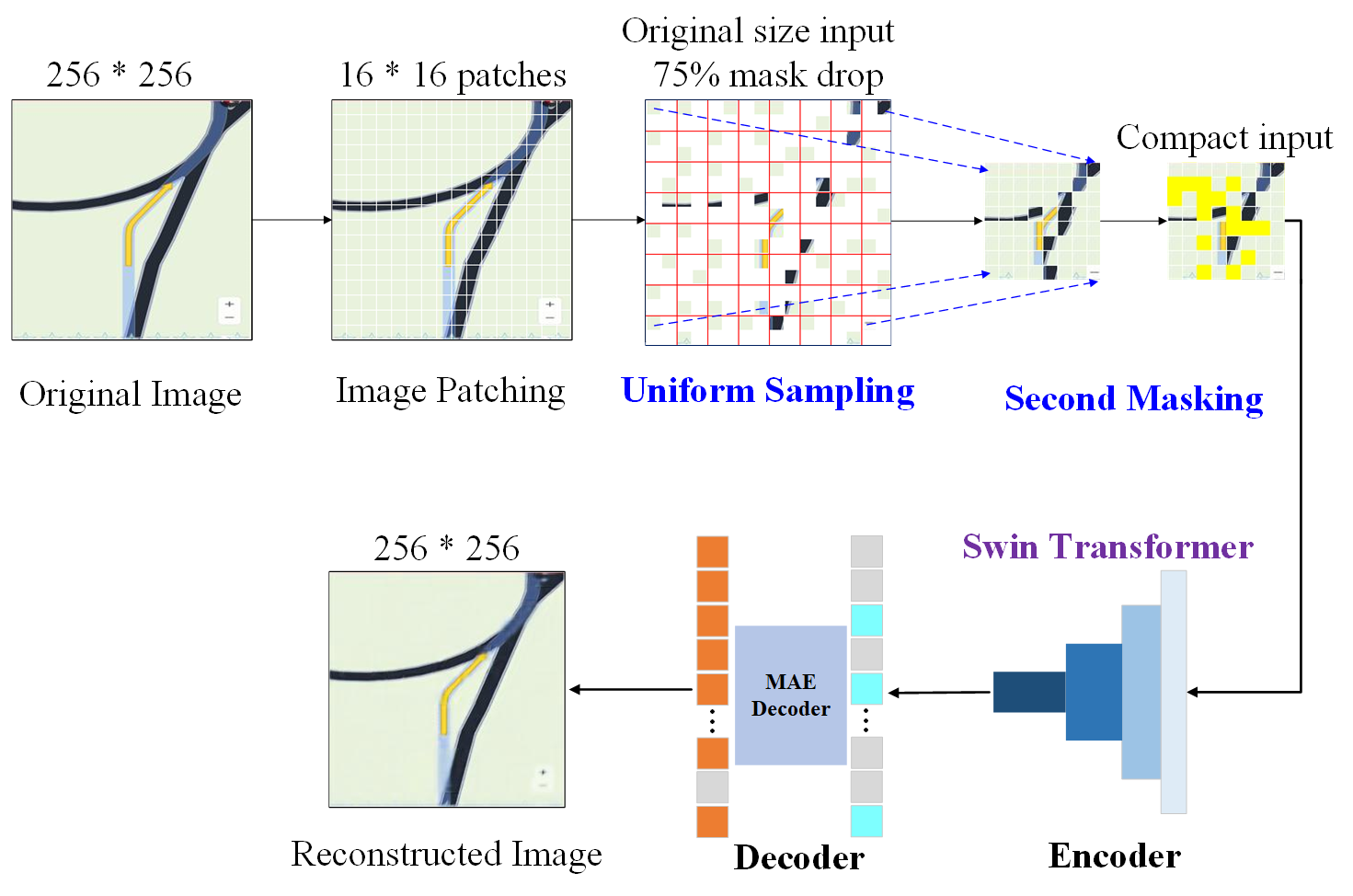
The illustration of the Uniform Masking method pipeline for MiM of lane rendering images

The illustration of the BEiT method pipeline for MiM of lane rendering images

The model performance regarding different metrics
- Data-driven Semi-supervised Machine Learning with Safety Indicators for Abnormal Driving Behavior Detection (Published in TRR; Accepted by and presented at TRB2024)
- Objective: To efficiently detect abnormal driving behaviour using semi-supervised ML with partly labelled data
- Developed a Hierarchical Extreme Learning Machines (HELM) based semi-supervised ML method
- Introduced and verified Surrogate Safety Measures (SSMs) (2D-TTC) as the prominent input features for enhancing the detection performance

The framework of HELM-based semi-supervised machine learning method

Comparison model performance results under different settings
- Comparative Study on Supervised versus Semi-supervised Machine Learning for Anomaly Detection of In-vehicle CAN Network (Published in ITSC 2022, Recorded Video Presentation)
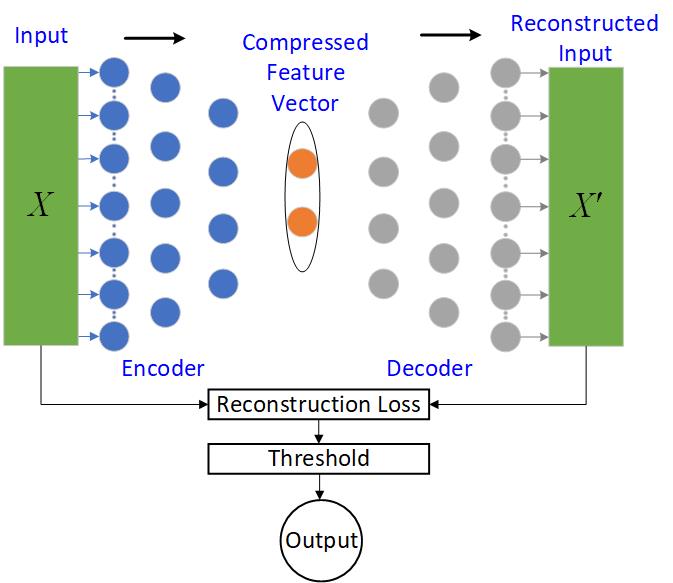
Framework of deep autoencoder based semi-supervised method
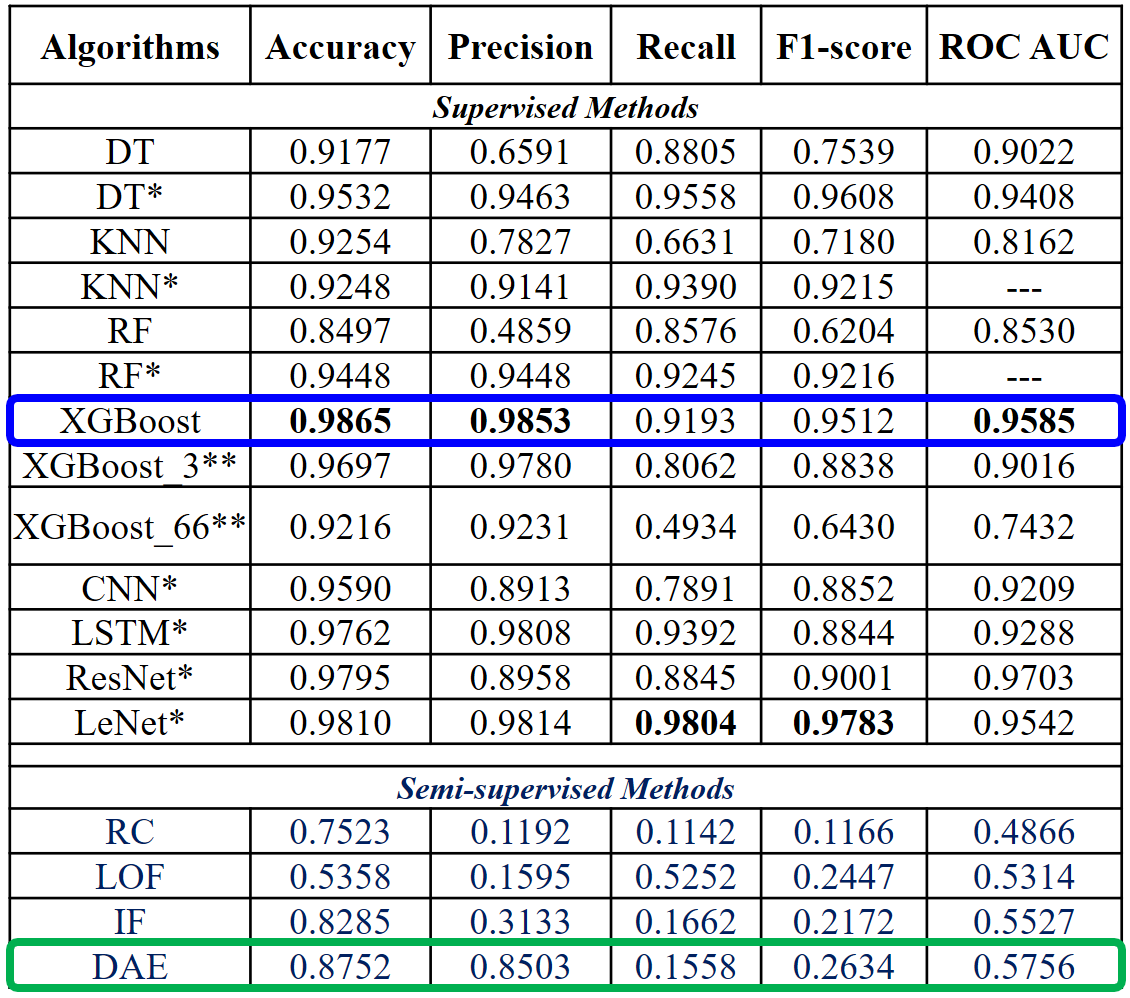
CAN Bus data anomaly detection results: model performance comparison
Deep Reinforcement Learning for Controlling and Decision-making
Towards Developing Socially-Compliant Automated Vehicles: State of the Practice, Experts Expectations, and a Conceptual Framework (To be submitted to Journal of Transport Reviews, accepted by and presented at MFTS2022)
Social-aware Planning and Control for Automated Vehicles based on Driving Risk Field and Model Predictive Contouring Control: Driving through Roundabouts as a Case Study (Published in IEEE SMC 2023, Demo video)
Social-aware Planning and Control for Automated Vehicles based on DRF-SVO-MPCC
- Comprehensive Training and Evaluation on Deep Reinforcement Learning for Automated Driving in Various Simulated Driving Maneuvers (Published in the 26th IEEE International Conference on Intelligent Transportation Systems, ITSC 2023)
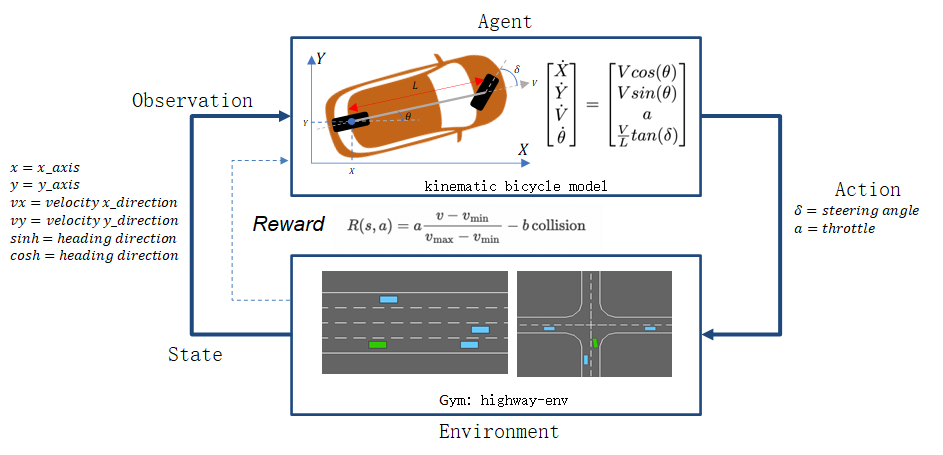
Illustration of the DRL MDP system framework
- Safe, Efficient, Comfort, and Energy-Saving Automated Driving Through Roundabout Based on Deep Reinforcement Learning (Published in the 26th IEEE International Conference on Intelligent Transportation Systems, ITSC 2023)
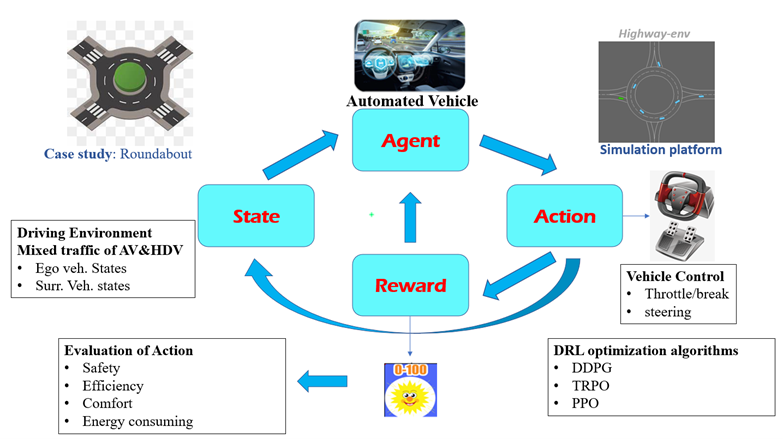
The overall architecture of DRL for automated driving through roundabouts
Big Data Analytics for Spatial-temporal Pattern Mining in Shared Mobility
- An Empirical Study on Travel Patterns of Internet Based Ride-Sharing (Published in TR_C)
- On-demand ride-sharing is quite different from taxi
- In Beijing, on the macrocosmic level, on-demand ride-sharing mainly serves as an approach for home-work commuting
- Internet-based on-demand ride-sharing drivers intend to make longer trips than taxis, and detour further to pick up passengers than hitchhike drivers
Regarding Individual Behavior Patterns of Ride-sharing Drivers- Two different categories are identified: the home-work commuting drivers and the random commuting drivers;
- Counterintuitively, the home-work commuting ones account for only a small part of the total drivers
- There is a high probability of being classified into the home-work commuting category when fewer trips are served by the specific driver
- Results support and are in line with policy-making
- On-demand ride-sharing is quite different from taxi
Dynamic spatial-temporal service patterns
- Revealing Travel Patterns of Sharing-bikes in a Spatial-temporal Manner using Non-negative Matrix Factorization Method (Published in CICTP 2018)
- Sharing bikes provide short-distance travel services around subway stations with three peaks
- Bike-sharing could be expressed by three (or five) basis collective patterns which differ from ride-sharing of two collective patterns
- The NMF method is more appropriate than PCA in extracting spatial-temporal patterns in transportation research
- Sharing bikes provide short-distance travel services around subway stations with three peaks
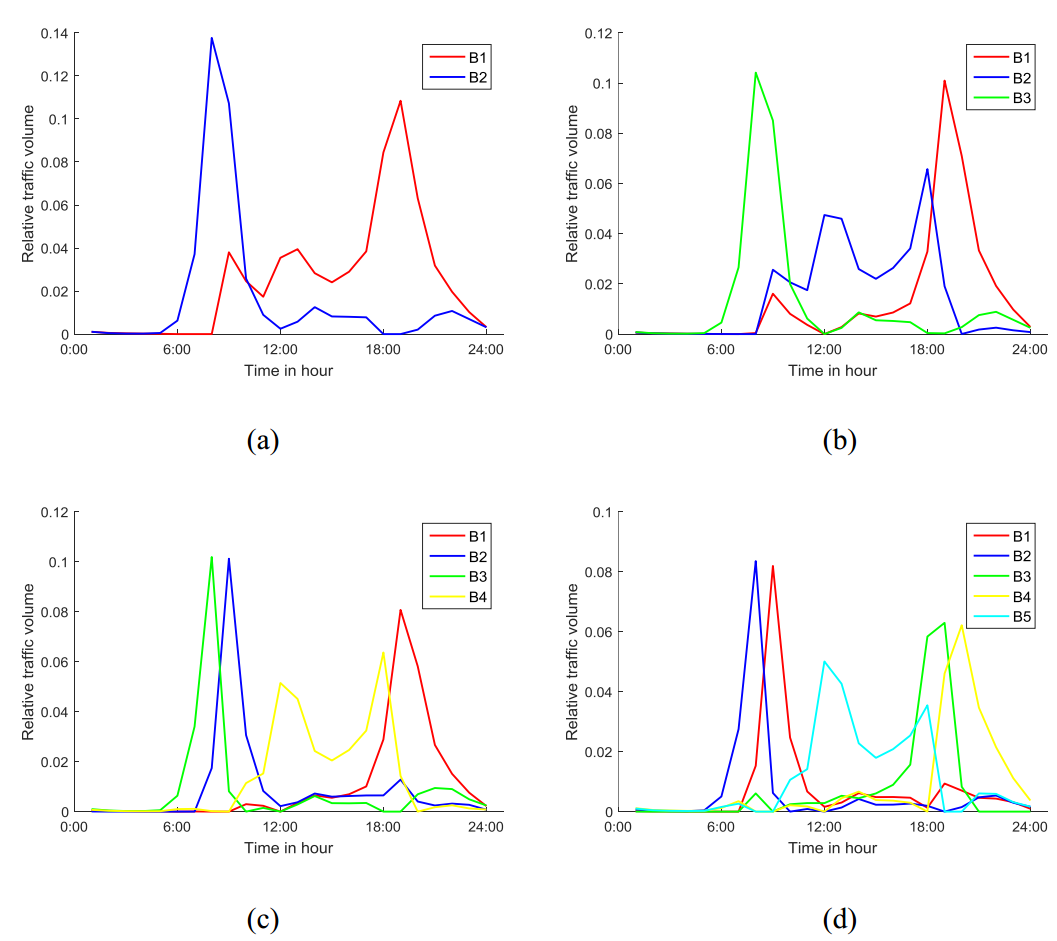
Extracted basis collective patterns of bike-sharing by non-negative matrix factorization